რბილი სტარტერი არის ძრავის მართვის მოწყობილობა, რომელიც აერთიანებს რბილ სტარტს, რბილ გაჩერებას, მსუბუქი დატვირთვის ენერგიის დაზოგვას და მრავალჯერადი დაცვის ფუნქციებს. ის ძირითადად შედგება სამფაზიანი ანტიპარალელური ტირისტორებისგან, რომლებიც სერიულად არის დაკავშირებული კვების წყაროსა და მართვად ძრავას და მის ელექტრონულ მართვის წრედს შორის. სამფაზიანი ანტიპარალელური ტირისტორების გამტარობის კუთხის გასაკონტროლებლად გამოიყენება სხვადასხვა მეთოდი, ისე, რომ კონტროლირებადი ძრავის შეყვანის ძაბვა იცვლება სხვადასხვა მოთხოვნების შესაბამისად.
1. იყენებს მიკროპროცესორულ ციფრულ ავტომატურ მართვას, მას აქვს შესანიშნავი ელექტრომაგნიტური შესრულება. რბილი გაშვება, რბილი გაჩერება ან თავისუფალი გაჩერება.
2. საწყისი დენის დარტყმის შესამცირებლად, საწყისი ძაბვა, დენი, რბილი გაშვების და რბილი გამორთვის დრო შეიძლება განისაზღვროს სხვადასხვა დატვირთვის მიხედვით. სტაბილური მუშაობა, მარტივი მუშაობა, პირდაპირი ჩვენება, მცირე მოცულობა, ციფრული კომპლექტი, აქვს ტელემართვის და გარე კონტროლის ფუნქციები.
3. აქვს დაცვა ფაზის დაკარგვის, გადაჭარბებული ძაბვის, გადატვირთვის, ჭარბი დენის და გადახურებისგან.
4. აქვს შეყვანის ძაბვის ჩვენების, სამუშაო დენის ჩვენების, გაუმართაობის თვითშემოწმების, გაუმართაობის მეხსიერების ფუნქციები. აქვს 0-20mA სიმულაციური მნიშვნელობის გამომავალი, შეუძლია ძრავის დენის მონიტორინგის განხორციელება.
ცვლადენოვანი დენის ინდუქციურ ძრავას აქვს დაბალი ღირებულება, მაღალი საიმედოობა და იშვიათი მოვლა-პატრონობა.
ნაკლოვანებები:
1. საწყისი დენი 5-7-ჯერ აღემატება ნომინალურ დენს. ეს მოითხოვს, რომ დენის წყაროს ჰქონდეს დიდი ზღვარი და ასევე შეამცირებს ელექტრო მართვის მოწყობილობის მუშაობის ვადას, რაც გააუმჯობესებს მოვლა-პატრონობის ხარჯებს.
2. სასტარტო ბრუნვის მომენტი ნორმალური სასტარტო ბრუნვის ორმაგი დროით ხდება, რაც იწვევს დატვირთვის დარტყმას და წამყვანი კომპონენტების დაზიანებას. RDJR6 რბილი სტარტერი იყენებს მართვად თიისტორის მოდულს და ფაზის ცვლის ტექნოლოგიას ძრავის ძაბვის რეგულარულად გასაუმჯობესებლად. მას შეუძლია ძრავის ბრუნვის მომენტის, დენის და დატვირთვის მოთხოვნების რეალიზება საკონტროლო პარამეტრით. RDJR6 სერიის რბილი სტარტერი იყენებს მიკროპროცესორს ცვლადი დენის ასინქრონული ძრავის რბილი გაშვებისა და რბილი გამორთვის ფუნქციების სამართავად და რეალიზებისთვის, აქვს სრული დაცვის ფუნქცია და ფართოდ გამოიყენება ძრავის წამყვანი მოწყობილობებში მეტალურგიის, ნავთობის, მაღაროების და ქიმიური მრეწველობის სფეროებში.
წარმოების სპეციფიკაცია
| მოდელის ნომერი | ნომინალური სიმძლავრე (კვტ) | ნომინალური დენი (A) | გამოყენებითი ძრავის სიმძლავრე (კვტ) | ფორმის ზომა (მმ) | წონა (კგ) | შენიშვნა | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | სურ. 2.1 |
| RDJR6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | სურ. 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | სურ. 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
დიაგრამა
ფუნქციური პარამეტრი
| კოდი | ფუნქციის სახელი | დიაპაზონის დაყენება | ნაგულისხმევი | ინსტრუქცია | |||||||
| P0 | საწყისი ძაბვა | (30-70) | 30 | PB1=1, ძაბვის დახრილობის მოდელი ეფექტურია; როდესაც PB პარამეტრი დენის რეჟიმშია, საწყისი ძაბვის ნაგულისხმევი მნიშვნელობა 40%-ია. | |||||||
| P1 | რბილი დაწყების დრო | (2-60) წმ | 16-ები | PB1=1, ძაბვის დახრილობის მოდელი ეფექტურია | |||||||
| P2 | რბილი გაჩერების დრო | (0-60) წმ | 0s | პარამეტრი=0, თავისუფალი გაჩერებისთვის. | |||||||
| P3 | პროგრამის დრო | (0-999) წმ | 0s | ბრძანებების მიღების შემდეგ, P3 მნიშვნელობის დაყენების შემდეგ დაწყების გადადების მიზნით, გამოიყენება უკუთვლის ტიპი. | |||||||
| P4 | დაწყების შეფერხება | (0-999) წმ | 0s | პროგრამირებადი რელეს მოქმედების შეფერხება | |||||||
| P5 | პროგრამის შეფერხება | (0-999) წმ | 0s | გადახურების მოხსნისა და P5 პარამეტრის დაყოვნების შემდეგ, ის მზადყოფნაში იყო. | |||||||
| P6 | ინტერვალის შეფერხება | (50-500)% | 400% | დაკავშირებული იყოს PB პარამეტრთან, როდესაც PB პარამეტრი 0-ის ტოლია, ნაგულისხმევი მნიშვნელობაა 280% და შესწორება ძალაშია. როდესაც PB პარამეტრი 1-ის ტოლია, ზღვრული მნიშვნელობაა 400%. | |||||||
| P7 | შეზღუდული საწყისი დენი | (50-200)% | 100% | გამოიყენეთ ძრავის გადატვირთვისგან დაცვის მნიშვნელობის რეგულირებისთვის, P6, P7 შეყვანის ტიპი დამოკიდებულია P8-ზე. | |||||||
| P8 | მაქსიმალური ოპერაციული დენი | 0-3 | 1 | გამოიყენება მიმდინარე მნიშვნელობის ან პროცენტების დასაყენებლად | |||||||
| P9 | მიმდინარე ჩვენების რეჟიმი | (40-90)% | 80% | დაყენებულ მნიშვნელობაზე დაბალი, გაუმართაობის ჩვენება აჩვენებს „Err09“-ს. | |||||||
| PA | დაბალი ძაბვისგან დაცვა | (100-140)% | 120% | დაყენებულ მნიშვნელობაზე მაღალია, გაუმართაობის მაჩვენებელია „Err10“ | |||||||
| PB | დაწყების მეთოდი | 0-5 | 1 | 0 დენის შეზღუდვა, 1 ძაბვა, 2 დარტყმა+დენის შეზღუდვა, 3 დარტყმა+დენის ლიმიტი, 4 დენის დახრილობა, 5 ორმაგი მარყუჟის ტიპი | |||||||
| PC | გამომავალი დაცვის დაშვება | 0-4 | 4 | 0 ძირითადი, 1 წთ დატვირთვა, 2 სტანდარტული, 3 მძიმე დატვირთვა, 4 უფროსი | |||||||
| PD | ოპერაციული კონტროლის რეჟიმი | 0-7 | 1 | გამოიყენეთ პანელის და გარე მართვის ტერმინალის პარამეტრების ასარჩევად. 0, მხოლოდ პანელის მუშაობისთვის, 1 როგორც პანელის, ასევე გარე მართვის ტერმინალის მუშაობისთვის. | |||||||
| PE | ავტომატური გადატვირთვის არჩევანი | 0-13 | 0 | 0: აკრძალვა, 1-9 ავტომატური გადატვირთვის დროისთვის | |||||||
| PF | პარამეტრის შესწორება დაშვება | 0-2 | 1 | 0: fohibid, 1 დასაშვები ნაწილობრივ შესწორებული მონაცემებისთვის, 2 დასაშვები ყველა შესწორებული მონაცემებისთვის | |||||||
| PH | საკომუნიკაციო მისამართი | 0-63 | 0 | გამოიყენება მრავალჯერადი რბილი სტარტერისა და ზედა მოწყობილობის კომუნიკაციისთვის | |||||||
| PJ | პროგრამის გამომავალი | 0-19 | 7 | გამოიყენეთ პროგრამირებადი რელეს გამომავალი (3-4) დასაყენებლად. | |||||||
| PL | რბილი გაჩერების დენი შეზღუდულია | (20-100)% | 80% | გამოიყენეთ P2 რბილი შეჩერების დენის შეზღუდვის პარამეტრისთვის | |||||||
| PP | ძრავის ნომინალური დენი | (11-1200)ა | შეფასებული მნიშვნელობა | გამოიყენეთ ძრავის ნომინალური დენის შესაყვანად | |||||||
| PU | ძრავის დაბალი ძაბვისგან დაცვა | (10-90)% | აკრძალვა | გამოიყენება ძრავის დაბალი ძაბვისგან დაცვის ფუნქციების დასაყენებლად. | |||||||
წარუმატებლობის ინსტრუქცია
| კოდი | ინსტრუქცია | პრობლემა და გადაწყვეტა | |||||||||
| Err00 | წარუმატებლობის გარეშე | დაბალი ძაბვის, ჭარბი ძაბვის, გადახურების ან დროებითი გაჩერების ტერმინალის გახსნის პრობლემა გამოსწორდა. პანელის ინდიკატორი ანათებს, გადატვირთვისთვის დააჭირეთ ღილაკს „გაჩერება“, შემდეგ კი ჩართეთ ძრავა. | |||||||||
| Err01 | გარე გარდამავალი გაჩერების ტერმინალი ღიაა | შეამოწმეთ, არის თუ არა გარე გარდამავალი ტერმინალი 7 და საერთო ტერმინალი 10 მოკლე ჩართვა, ან ნორმალურია თუ არა სხვა დამცავი მოწყობილობების დაურეგულირებელი კონტაქტი. | |||||||||
| Err02 | რბილი სტარტერის გადახურება | რადიატორის ტემპერატურა 85°C-ს აღემატება, არსებობს გადახურებისგან დაცვა, რბილი სტარტერი ძრავას ძალიან ხშირად ჩართავს ან ძრავის სიმძლავრე არ შეესაბამება რბილ სტარტერს. | |||||||||
| Err03 | ოვერტაიმის დაწყება | საწყისი პარამეტრების მონაცემები არ არის შესაბამისი ან დატვირთვა ძალიან დიდია, სიმძლავრე ძალიან მცირეა | |||||||||
| Err04 | შეყვანის ფაზის დაკარგვა | შეამოწმეთ, აქვს თუ არა შეყვანის ან მთავარი მარყუჟის გაუმართაობა, ან შემოვლითი კონტაქტორი შეიძლება გაწყდეს და წრედი ნორმალურად ამუშაოს, ან სილიკონის კონტროლი ღიაა. | |||||||||
| Err05 | გამომავალი ფაზის დაკარგვა | შეამოწმეთ, აქვს თუ არა შეყვანას ან მთავარ მარყუჟს გაუმართაობა, ან ხომ არ შეიძლება შემოვლითი კონტაქტორის გაწყვეტა და წრედის ნორმალურად შექმნა, ან ხომ არ არის სილიკონის კონტროლი ღია, ან ხომ არ აქვს ძრავის კავშირს რაიმე გაუმართაობა. | |||||||||
| Err06 | დაუბალანსებელი სამფაზიანი | შეამოწმეთ, აქვს თუ არა შემავალ სამფაზიან კვებას და ძრავას რაიმე შეცდომა, ან ხომ არ გასცემს დენის ტრანსფორმატორი სიგნალებს. | |||||||||
| Err07 | გადაჭარბებული დენის დაწყება | თუ დატვირთვა ძალიან დიდია ან ძრავის სიმძლავრე გამოიყენება რბილი სტარტერით, ან დაყენებული მნიშვნელობის PC (გამომავალი დაცვა დაშვებულია) დაყენების შეცდომა. | |||||||||
| Err08 | ოპერაციული გადატვირთვისგან დაცვა | თუ დატვირთვა ძალიან მძიმეა ან P7, PP პარამეტრი არასწორია. | |||||||||
| Err09 | დაბალი ძაბვა | შეამოწმეთ, ხომ არ არის P9-ის შეყვანის დენის ძაბვა ან დაყენების თარიღი არასწორი | |||||||||
| Err10 | გადაჭარბებული ძაბვა | შეამოწმეთ, ხომ არ არის შეყვანის დენის ძაბვა ან PA-ს დაყენების თარიღი არასწორი | |||||||||
| Err11 | მონაცემთა დაყენების შეცდომა | გადატვირთვის დასაწყებად შეცვალეთ პარამეტრი ან დააჭირეთ ღილაკს „Enter“ | |||||||||
| Err12 | დატვირთვის მოკლე ჩართვა | შეამოწმეთ, ხომ არ არის სილიკონი მოკლე ჩართვაში, დატვირთვა ძალიან დიდია თუ ძრავის ხვეული მოკლე ჩართვაში. | |||||||||
| Err13 | გადატვირთვისას დაკავშირების შეცდომა | შეამოწმეთ, ერთმანეთთან დაკავშირებულია თუ არა გარე გაშვების ტერმინალი 9 და გაჩერების ტერმინალი 8 ორხაზიანი ტიპის მიხედვით. | |||||||||
| Err14 | გარე გაჩერების ტერმინალის დაკავშირების შეცდომა | როდესაც PD პარამეტრია 1, 2, 3, 4 (გარე კონტროლის დაშვება), გარე გამთიშველი ტერმინალი 8 და საერთო ტერმინალი 10 არ იწვევენ მოკლე ჩართვას. მხოლოდ მათ შემთხვევაში მოხდება მოკლე ჩართვა, ძრავის ჩართვა შესაძლებელია. | |||||||||
| Err15 | ძრავის არასაკმარისი დატვირთვა | შეამოწმეთ ძრავა და დატვირთვის შეცდომა. | |||||||||
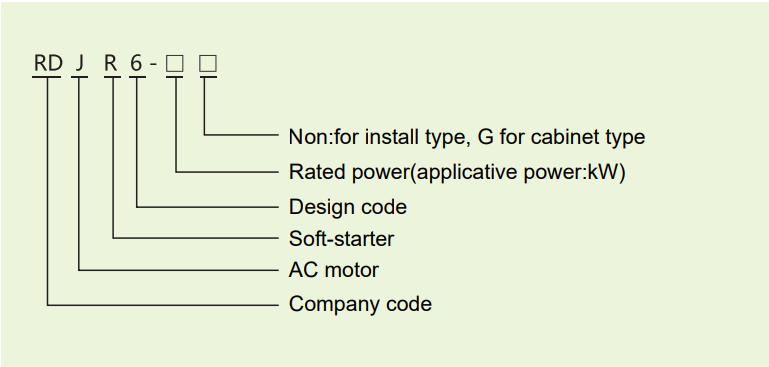
მოდელის ნომერი
გარე მართვის ტერმინალი

გარე მართვის ტერმინალის განმარტება
| მნიშვნელობის გადართვა | ტერმინალის კოდი | ტერმინალის ფუნქცია | ინსტრუქცია | |||||||
| რელეს გამომავალი | 1 | შემოვლითი გამომავალი | მართვის შემოვლითი კონტაქტორი, როდესაც რბილი სტარტერი წარმატებით იწყება, ის არ არის კონტაქტი კვების წყაროს გარეშე, სიმძლავრე: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | პროგრამირებადი რელე გამომავალი | გამომავალი ტიპი და ფუნქციები დაყენებულია P4 და PJ-ის მიერ, ის არის უკონტაქტო კვების წყაროს გარეშე, სიმძლავრე: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | გაუმართაობის რელეს გამომავალი | როდესაც რბილი სტარტერი გაუმართავია, ეს რელე დახურულია, ის არ არის კონტაქტი კვების წყაროს გარეშე, სიმძლავრე: AC250V/5A | ||||||||
| 6 | ||||||||||
| შეყვანა | 7 | დროებითი გაჩერება | რბილი სტარტერის ნორმალური ჩართვის შემთხვევაში, ეს ტერმინალი უნდა შემოკლდეს ტერმინალი 10-ით. | |||||||
| 8 | გაჩერება/გადატვირთვა | უკავშირდება ტერმინალ 10-ს 2-ხაზიანი და 3-ხაზიანი კაბელების სამართავად. კავშირის მეთოდის მიხედვით. | ||||||||
| 9 | დაწყება | |||||||||
| 10 | საერთო ტერმინალი | |||||||||
| ანალოგური გამომავალი | 11 | სიმულაციის საერთო წერტილი (-) | ნომინალური დენის ოთხჯერ გამრავლებული გამომავალი დენი არის 20mA, მისი აღმოჩენა ასევე შესაძლებელია გარე DC მრიცხველით, მას შეუძლია გამომავალი დატვირთვის მაქსიმალური წინააღმდეგობა 300-ია. | |||||||
| 12 | სიმულაციის დენის გამომავალი (+) | |||||||||
ჩვენების პანელი

| ინდიკატორი | ინსტრუქცია | ||||||||
| მზადაა | როდესაც ჩართულია და მზადაა, ეს ინდიკატორი ანათებს | ||||||||
| გაივლის | შემოვლითი მუშაობისას, ეს ინდიკატორი ანათებს | ||||||||
| შეცდომა | როდესაც გაუმართაობა ხდება, ეს ინდიკატორი ანათებს | ||||||||
| A | პარამეტრების მონაცემები მიმდინარე მნიშვნელობაა, ეს ინდიკატორი ანათებს | ||||||||
| % | პარამეტრების მონაცემები მიმდინარე პროცენტულია, ეს ინდიკატორი ანათებს | ||||||||
| s | მონაცემების დაყენება დროა, ეს ინდიკატორი ანათებს | ||||||||
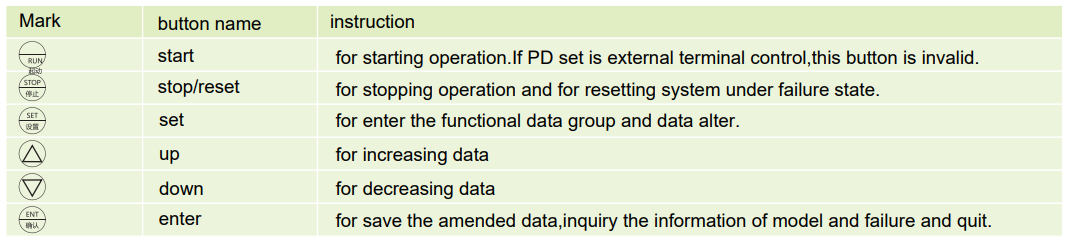
მდგომარეობის ინდიკატორის ინსტრუქცია
ღილაკის ინსტრუქციის ინსტრუქცია
RDJR6 სერიის რბილ სტარტერს აქვს 5 სახის ოპერაციული მდგომარეობა: მზადყოფნა, მუშაობა, გაუმართაობა, ჩართვა და გაჩერება, მზადყოფნა, მუშაობა, გაუმართაობა.
აქვს ფარდობითი ინდიკატორის სიგნალი. ინსტრუქცია იხილეთ ზემოთ მოცემულ ცხრილში.
რბილი გაშვების და რბილი გაჩერების დამუშავებისას მონაცემების დაყენება შეუძლებელია მხოლოდ იმ შემთხვევაში, თუ ის სხვა მდგომარეობაშია.
დაყენების მდგომარეობაში, დაყენების მდგომარეობა 2 წუთის შემდეგ ყოველგვარი მოქმედების გარეშე დახურავს დაყენების მდგომარეობას.
ჯერ დააჭირეთ ღილაკს „Enter“, შემდეგ დატენეთ და ჩართეთ სტარტერი. სიგნალის მოსმენის შემდეგ, მას შეუძლია გადატვირთოს
მონაცემთა დაბრუნების ქარხნული ღირებულება.
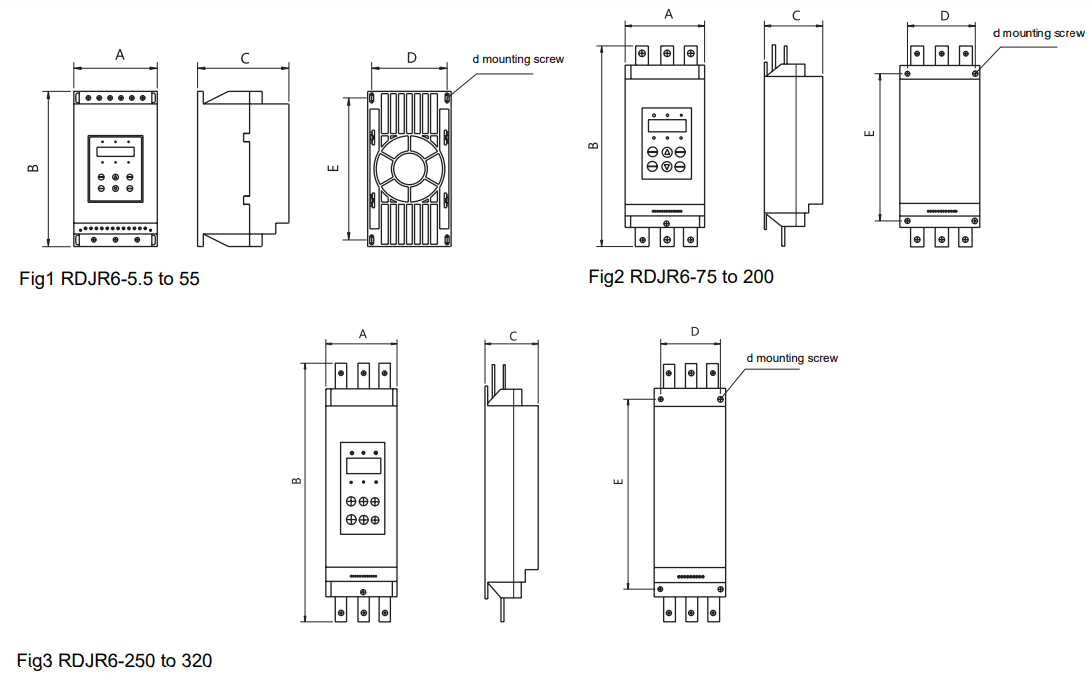
გარეგნობა და მონტაჟის ზომები
გამოყენების დიაგრამა
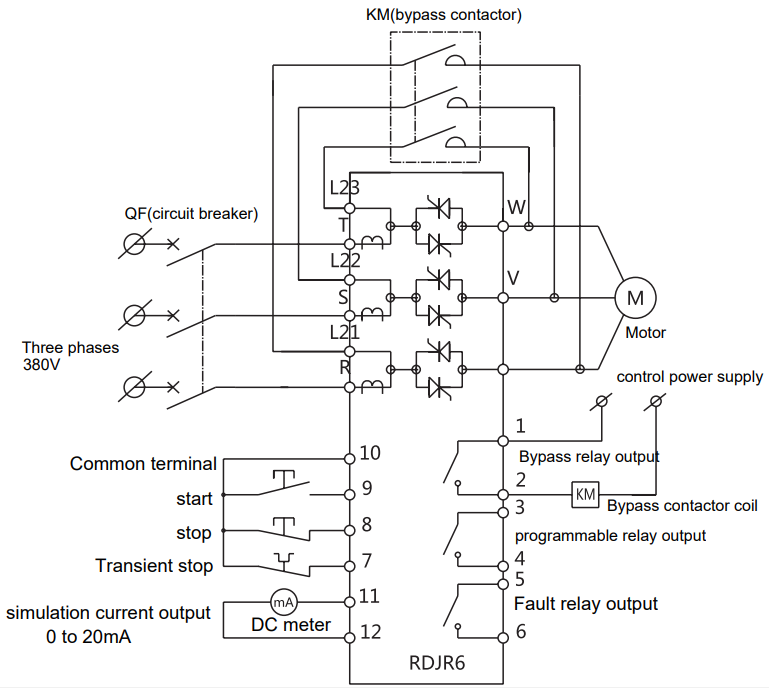
ნორმალური მართვის დიაგრამა
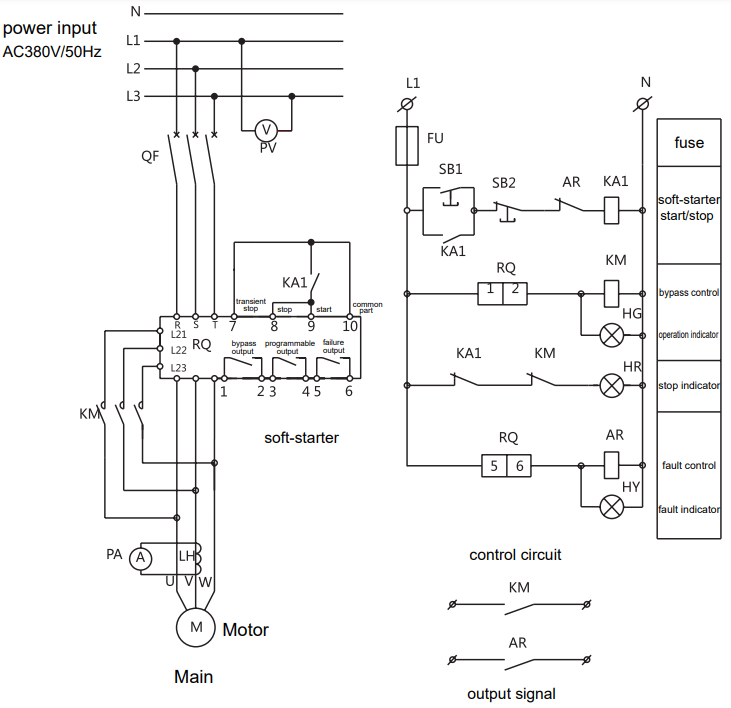
ინსტრუქცია:
1. გარე ტერმინალი იყენებს ორხაზიან t-კონტროლის ტიპს. როდესაც KA1 დახურულია გაშვებისთვის, იხსნება გასაჩერებლად.
2. რბილი სტარტერი, რომელიც 75 კვტ-ზე მეტ სიმძლავრეს იძლეოდა, შუა რელეთი უნდა მართოს შემოვლითი კონტაქტორის კოჭა, რბილი სტარტერის შიდა რელეს კონტაქტის შეზღუდული გამტარუნარიანობის გამო.
12.2 ერთი საერთო და ერთი სარეზერვო მართვის დიაგრამა
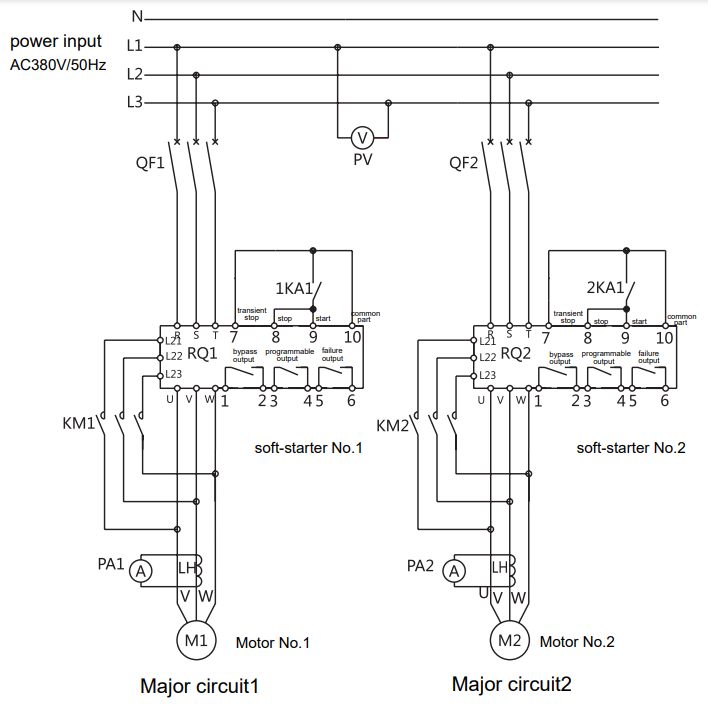
12.3 ერთი საერთო და ერთი სარეზერვო მართვის დიაგრამა
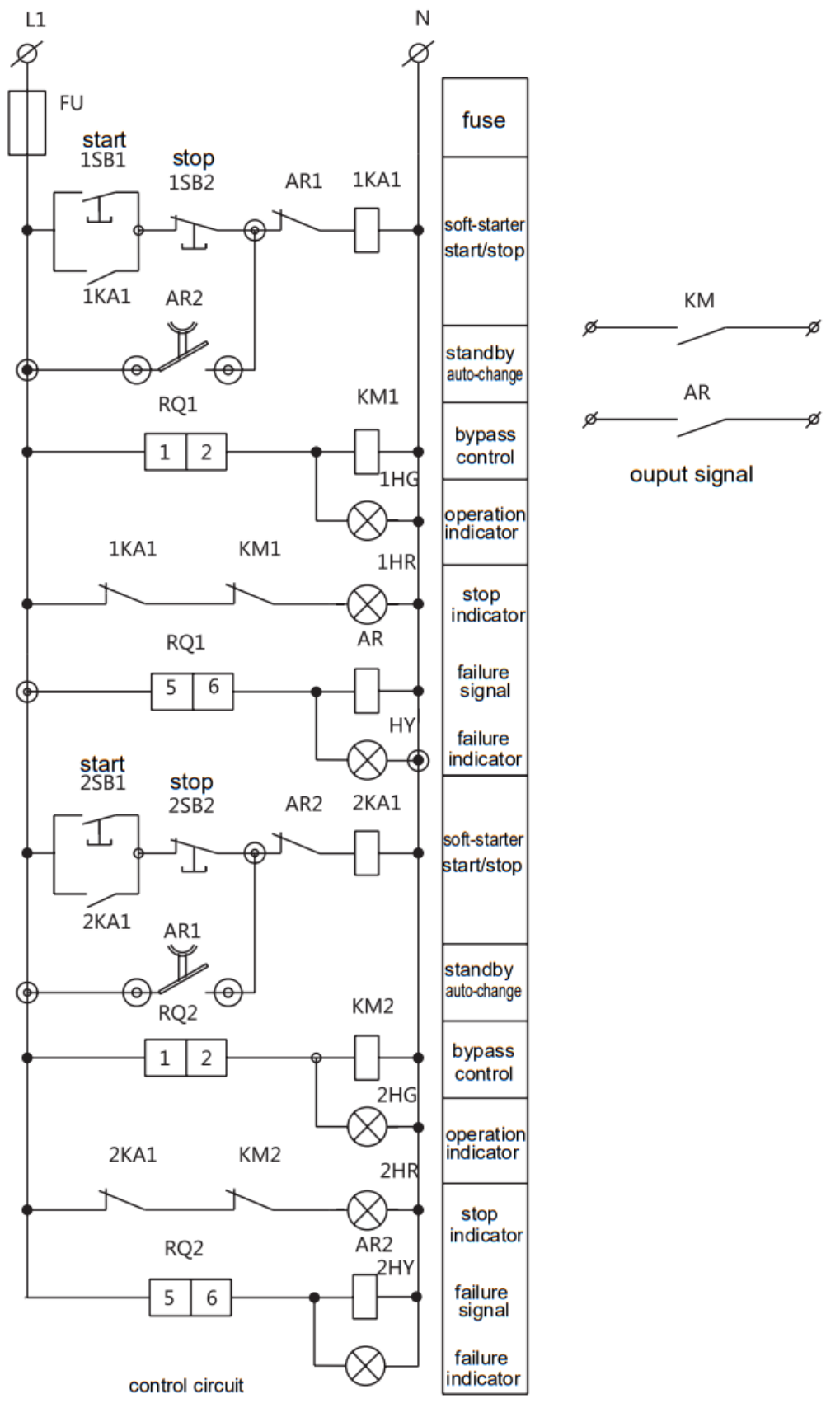
ინსტრუქცია:
1. დიაგრამაზე, გარე ტერმინალი იყენებს ორხაზიან ტიპს
(როდესაც 1KA1 ან 2KA1 დახურულია, ის ირთვება. როდესაც ისინი ფუჭდება, ის ჩერდება.)
2. 75 კვტ-ზე მეტი სიმძლავრის რბილი სტარტერი საჭიროებს შემოვლითი კონტაქტორის კოჭის შუა რელეთი მართვას, რადგან რბილი სტარტერის შიდა შუა რელეს კონტაქტის გამტარუნარიანობა შეზღუდულია.
ცვლადენოვანი დენის ინდუქციურ ძრავას აქვს დაბალი ღირებულება, მაღალი საიმედოობა და იშვიათი მოვლა-პატრონობა.
ნაკლოვანებები:
1. საწყისი დენი 5-7-ჯერ აღემატება ნომინალურ დენს. ეს მოითხოვს, რომ დენის წყაროს ჰქონდეს დიდი ზღვარი და ასევე შეამცირებს ელექტრო მართვის მოწყობილობის მუშაობის ვადას, რაც გააუმჯობესებს მოვლა-პატრონობის ხარჯებს.
2. სასტარტო ბრუნვის მომენტი ნორმალური სასტარტო ბრუნვის ორმაგი დროით ხდება, რაც იწვევს დატვირთვის დარტყმას და წამყვანი კომპონენტების დაზიანებას. RDJR6 რბილი სტარტერი იყენებს მართვად თიისტორის მოდულს და ფაზის ცვლის ტექნოლოგიას ძრავის ძაბვის რეგულარულად გასაუმჯობესებლად. მას შეუძლია ძრავის ბრუნვის მომენტის, დენის და დატვირთვის მოთხოვნების რეალიზება საკონტროლო პარამეტრით. RDJR6 სერიის რბილი სტარტერი იყენებს მიკროპროცესორს ცვლადი დენის ასინქრონული ძრავის რბილი გაშვებისა და რბილი გამორთვის ფუნქციების სამართავად და რეალიზებისთვის, აქვს სრული დაცვის ფუნქცია და ფართოდ გამოიყენება ძრავის წამყვანი მოწყობილობებში მეტალურგიის, ნავთობის, მაღაროების და ქიმიური მრეწველობის სფეროებში.
წარმოების სპეციფიკაცია
| მოდელის ნომერი | ნომინალური სიმძლავრე (კვტ) | ნომინალური დენი (A) | გამოყენებითი ძრავის სიმძლავრე (კვტ) | ფორმის ზომა (მმ) | წონა (კგ) | შენიშვნა | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | სურ. 2.1 |
| RDJR6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | სურ. 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | სურ. 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
დიაგრამა
ფუნქციური პარამეტრი
| კოდი | ფუნქციის სახელი | დიაპაზონის დაყენება | ნაგულისხმევი | ინსტრუქცია | |||||||
| P0 | საწყისი ძაბვა | (30-70) | 30 | PB1=1, ძაბვის დახრილობის მოდელი ეფექტურია; როდესაც PB პარამეტრი დენის რეჟიმშია, საწყისი ძაბვის ნაგულისხმევი მნიშვნელობა 40%-ია. | |||||||
| P1 | რბილი დაწყების დრო | (2-60) წმ | 16-ები | PB1=1, ძაბვის დახრილობის მოდელი ეფექტურია | |||||||
| P2 | რბილი გაჩერების დრო | (0-60) წმ | 0s | პარამეტრი=0, თავისუფალი გაჩერებისთვის. | |||||||
| P3 | პროგრამის დრო | (0-999) წმ | 0s | ბრძანებების მიღების შემდეგ, P3 მნიშვნელობის დაყენების შემდეგ დაწყების გადადების მიზნით, გამოიყენება უკუთვლის ტიპი. | |||||||
| P4 | დაწყების შეფერხება | (0-999) წმ | 0s | პროგრამირებადი რელეს მოქმედების შეფერხება | |||||||
| P5 | პროგრამის შეფერხება | (0-999) წმ | 0s | გადახურების მოხსნისა და P5 პარამეტრის დაყოვნების შემდეგ, ის მზადყოფნაში იყო. | |||||||
| P6 | ინტერვალის შეფერხება | (50-500)% | 400% | დაკავშირებული იყოს PB პარამეტრთან, როდესაც PB პარამეტრი 0-ის ტოლია, ნაგულისხმევი მნიშვნელობაა 280% და შესწორება ძალაშია. როდესაც PB პარამეტრი 1-ის ტოლია, ზღვრული მნიშვნელობაა 400%. | |||||||
| P7 | შეზღუდული საწყისი დენი | (50-200)% | 100% | გამოიყენეთ ძრავის გადატვირთვისგან დაცვის მნიშვნელობის რეგულირებისთვის, P6, P7 შეყვანის ტიპი დამოკიდებულია P8-ზე. | |||||||
| P8 | მაქსიმალური ოპერაციული დენი | 0-3 | 1 | გამოიყენება მიმდინარე მნიშვნელობის ან პროცენტების დასაყენებლად | |||||||
| P9 | მიმდინარე ჩვენების რეჟიმი | (40-90)% | 80% | დაყენებულ მნიშვნელობაზე დაბალი, გაუმართაობის ჩვენება აჩვენებს „Err09“-ს. | |||||||
| PA | დაბალი ძაბვისგან დაცვა | (100-140)% | 120% | დაყენებულ მნიშვნელობაზე მაღალია, გაუმართაობის მაჩვენებელია „Err10“ | |||||||
| PB | დაწყების მეთოდი | 0-5 | 1 | 0 დენის შეზღუდვა, 1 ძაბვა, 2 დარტყმა+დენის შეზღუდვა, 3 დარტყმა+დენის ლიმიტი, 4 დენის დახრილობა, 5 ორმაგი მარყუჟის ტიპი | |||||||
| PC | გამომავალი დაცვის დაშვება | 0-4 | 4 | 0 ძირითადი, 1 წთ დატვირთვა, 2 სტანდარტული, 3 მძიმე დატვირთვა, 4 უფროსი | |||||||
| PD | ოპერაციული კონტროლის რეჟიმი | 0-7 | 1 | გამოიყენეთ პანელის და გარე მართვის ტერმინალის პარამეტრების ასარჩევად. 0, მხოლოდ პანელის მუშაობისთვის, 1 როგორც პანელის, ასევე გარე მართვის ტერმინალის მუშაობისთვის. | |||||||
| PE | ავტომატური გადატვირთვის არჩევანი | 0-13 | 0 | 0: აკრძალვა, 1-9 ავტომატური გადატვირთვის დროისთვის | |||||||
| PF | პარამეტრის შესწორება დაშვება | 0-2 | 1 | 0: fohibid, 1 დასაშვები ნაწილობრივ შესწორებული მონაცემებისთვის, 2 დასაშვები ყველა შესწორებული მონაცემებისთვის | |||||||
| PH | საკომუნიკაციო მისამართი | 0-63 | 0 | გამოიყენება მრავალჯერადი რბილი სტარტერისა და ზედა მოწყობილობის კომუნიკაციისთვის | |||||||
| PJ | პროგრამის გამომავალი | 0-19 | 7 | გამოიყენეთ პროგრამირებადი რელეს გამომავალი (3-4) დასაყენებლად. | |||||||
| PL | რბილი გაჩერების დენი შეზღუდულია | (20-100)% | 80% | გამოიყენეთ P2 რბილი შეჩერების დენის შეზღუდვის პარამეტრისთვის | |||||||
| PP | ძრავის ნომინალური დენი | (11-1200)ა | შეფასებული მნიშვნელობა | გამოიყენეთ ძრავის ნომინალური დენის შესაყვანად | |||||||
| PU | ძრავის დაბალი ძაბვისგან დაცვა | (10-90)% | აკრძალვა | გამოიყენება ძრავის დაბალი ძაბვისგან დაცვის ფუნქციების დასაყენებლად. | |||||||
წარუმატებლობის ინსტრუქცია
| კოდი | ინსტრუქცია | პრობლემა და გადაწყვეტა | |||||||||
| Err00 | წარუმატებლობის გარეშე | დაბალი ძაბვის, ჭარბი ძაბვის, გადახურების ან დროებითი გაჩერების ტერმინალის გახსნის პრობლემა გამოსწორდა. პანელის ინდიკატორი ანათებს, გადატვირთვისთვის დააჭირეთ ღილაკს „გაჩერება“, შემდეგ კი ჩართეთ ძრავა. | |||||||||
| Err01 | გარე გარდამავალი გაჩერების ტერმინალი ღიაა | შეამოწმეთ, არის თუ არა გარე გარდამავალი ტერმინალი 7 და საერთო ტერმინალი 10 მოკლე ჩართვა, ან ნორმალურია თუ არა სხვა დამცავი მოწყობილობების დაურეგულირებელი კონტაქტი. | |||||||||
| Err02 | რბილი სტარტერის გადახურება | რადიატორის ტემპერატურა 85°C-ს აღემატება, არსებობს გადახურებისგან დაცვა, რბილი სტარტერი ძრავას ძალიან ხშირად ჩართავს ან ძრავის სიმძლავრე არ შეესაბამება რბილ სტარტერს. | |||||||||
| Err03 | ოვერტაიმის დაწყება | საწყისი პარამეტრების მონაცემები არ არის შესაბამისი ან დატვირთვა ძალიან დიდია, სიმძლავრე ძალიან მცირეა | |||||||||
| Err04 | შეყვანის ფაზის დაკარგვა | შეამოწმეთ, აქვს თუ არა შეყვანის ან მთავარი მარყუჟის გაუმართაობა, ან შემოვლითი კონტაქტორი შეიძლება გაწყდეს და წრედი ნორმალურად ამუშაოს, ან სილიკონის კონტროლი ღიაა. | |||||||||
| Err05 | გამომავალი ფაზის დაკარგვა | შეამოწმეთ, აქვს თუ არა შეყვანას ან მთავარ მარყუჟს გაუმართაობა, ან ხომ არ შეიძლება შემოვლითი კონტაქტორის გაწყვეტა და წრედის ნორმალურად შექმნა, ან ხომ არ არის სილიკონის კონტროლი ღია, ან ხომ არ აქვს ძრავის კავშირს რაიმე გაუმართაობა. | |||||||||
| Err06 | დაუბალანსებელი სამფაზიანი | შეამოწმეთ, აქვს თუ არა შემავალ სამფაზიან კვებას და ძრავას რაიმე შეცდომა, ან ხომ არ გასცემს დენის ტრანსფორმატორი სიგნალებს. | |||||||||
| Err07 | გადაჭარბებული დენის დაწყება | თუ დატვირთვა ძალიან დიდია ან ძრავის სიმძლავრე გამოიყენება რბილი სტარტერით, ან დაყენებული მნიშვნელობის PC (გამომავალი დაცვა დაშვებულია) დაყენების შეცდომა. | |||||||||
| Err08 | ოპერაციული გადატვირთვისგან დაცვა | თუ დატვირთვა ძალიან მძიმეა ან P7, PP პარამეტრი არასწორია. | |||||||||
| Err09 | დაბალი ძაბვა | შეამოწმეთ, ხომ არ არის P9-ის შეყვანის დენის ძაბვა ან დაყენების თარიღი არასწორი | |||||||||
| Err10 | გადაჭარბებული ძაბვა | შეამოწმეთ, ხომ არ არის შეყვანის დენის ძაბვა ან PA-ს დაყენების თარიღი არასწორი | |||||||||
| Err11 | მონაცემთა დაყენების შეცდომა | გადატვირთვის დასაწყებად შეცვალეთ პარამეტრი ან დააჭირეთ ღილაკს „Enter“ | |||||||||
| Err12 | დატვირთვის მოკლე ჩართვა | შეამოწმეთ, ხომ არ არის სილიკონი მოკლე ჩართვაში, დატვირთვა ძალიან დიდია თუ ძრავის ხვეული მოკლე ჩართვაში. | |||||||||
| Err13 | გადატვირთვისას დაკავშირების შეცდომა | შეამოწმეთ, ერთმანეთთან დაკავშირებულია თუ არა გარე გაშვების ტერმინალი 9 და გაჩერების ტერმინალი 8 ორხაზიანი ტიპის მიხედვით. | |||||||||
| Err14 | გარე გაჩერების ტერმინალის დაკავშირების შეცდომა | როდესაც PD პარამეტრია 1, 2, 3, 4 (გარე კონტროლის დაშვება), გარე გამთიშველი ტერმინალი 8 და საერთო ტერმინალი 10 არ იწვევენ მოკლე ჩართვას. მხოლოდ მათ შემთხვევაში მოხდება მოკლე ჩართვა, ძრავის ჩართვა შესაძლებელია. | |||||||||
| Err15 | ძრავის არასაკმარისი დატვირთვა | შეამოწმეთ ძრავა და დატვირთვის შეცდომა. | |||||||||
მოდელის ნომერი
გარე მართვის ტერმინალი
გარე მართვის ტერმინალის განმარტება
| მნიშვნელობის გადართვა | ტერმინალის კოდი | ტერმინალის ფუნქცია | ინსტრუქცია | |||||||
| რელეს გამომავალი | 1 | შემოვლითი გამომავალი | მართვის შემოვლითი კონტაქტორი, როდესაც რბილი სტარტერი წარმატებით იწყება, ის არ არის კონტაქტი კვების წყაროს გარეშე, სიმძლავრე: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | პროგრამირებადი რელე გამომავალი | გამომავალი ტიპი და ფუნქციები დაყენებულია P4 და PJ-ის მიერ, ის არის უკონტაქტო კვების წყაროს გარეშე, სიმძლავრე: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | გაუმართაობის რელეს გამომავალი | როდესაც რბილი სტარტერი გაუმართავია, ეს რელე დახურულია, ის არ არის კონტაქტი კვების წყაროს გარეშე, სიმძლავრე: AC250V/5A | ||||||||
| 6 | ||||||||||
| შეყვანა | 7 | დროებითი გაჩერება | რბილი სტარტერის ნორმალური ჩართვის შემთხვევაში, ეს ტერმინალი უნდა შემოკლდეს ტერმინალი 10-ით. | |||||||
| 8 | გაჩერება/გადატვირთვა | უკავშირდება ტერმინალ 10-ს 2-ხაზიანი და 3-ხაზიანი კაბელების სამართავად. კავშირის მეთოდის მიხედვით. | ||||||||
| 9 | დაწყება | |||||||||
| 10 | საერთო ტერმინალი | |||||||||
| ანალოგური გამომავალი | 11 | სიმულაციის საერთო წერტილი (-) | ნომინალური დენის ოთხჯერ გამრავლებული გამომავალი დენი არის 20mA, მისი აღმოჩენა ასევე შესაძლებელია გარე DC მრიცხველით, მას შეუძლია გამომავალი დატვირთვის მაქსიმალური წინააღმდეგობა 300-ია. | |||||||
| 12 | სიმულაციის დენის გამომავალი (+) | |||||||||
ჩვენების პანელი
| ინდიკატორი | ინსტრუქცია | ||||||||
| მზადაა | როდესაც ჩართულია და მზადაა, ეს ინდიკატორი ანათებს | ||||||||
| გაივლის | შემოვლითი მუშაობისას, ეს ინდიკატორი ანათებს | ||||||||
| შეცდომა | როდესაც გაუმართაობა ხდება, ეს ინდიკატორი ანათებს | ||||||||
| A | პარამეტრების მონაცემები მიმდინარე მნიშვნელობაა, ეს ინდიკატორი ანათებს | ||||||||
| % | პარამეტრების მონაცემები მიმდინარე პროცენტულია, ეს ინდიკატორი ანათებს | ||||||||
| s | მონაცემების დაყენება დროა, ეს ინდიკატორი ანათებს | ||||||||
მდგომარეობის ინდიკატორის ინსტრუქცია
ღილაკის ინსტრუქციის ინსტრუქცია
RDJR6 სერიის რბილ სტარტერს აქვს 5 სახის ოპერაციული მდგომარეობა: მზადყოფნა, მუშაობა, გაუმართაობა, ჩართვა და გაჩერება, მზადყოფნა, მუშაობა, გაუმართაობა.
აქვს ფარდობითი ინდიკატორის სიგნალი. ინსტრუქცია იხილეთ ზემოთ მოცემულ ცხრილში.
რბილი გაშვების და რბილი გაჩერების დამუშავებისას მონაცემების დაყენება შეუძლებელია მხოლოდ იმ შემთხვევაში, თუ ის სხვა მდგომარეობაშია.
დაყენების მდგომარეობაში, დაყენების მდგომარეობა 2 წუთის შემდეგ ყოველგვარი მოქმედების გარეშე დახურავს დაყენების მდგომარეობას.
ჯერ დააჭირეთ ღილაკს „Enter“, შემდეგ დატენეთ და ჩართეთ სტარტერი. სიგნალის მოსმენის შემდეგ, მას შეუძლია გადატვირთოს
მონაცემთა დაბრუნების ქარხნული ღირებულება.
გარეგნობა და მონტაჟის ზომები
გამოყენების დიაგრამა
ნორმალური მართვის დიაგრამა
ინსტრუქცია:
1. გარე ტერმინალი იყენებს ორხაზიან t-კონტროლის ტიპს. როდესაც KA1 დახურულია გაშვებისთვის, იხსნება გასაჩერებლად.
2. რბილი სტარტერი, რომელიც 75 კვტ-ზე მეტ სიმძლავრეს იძლეოდა, შუა რელეთი უნდა მართოს შემოვლითი კონტაქტორის კოჭა, რბილი სტარტერის შიდა რელეს კონტაქტის შეზღუდული გამტარუნარიანობის გამო.
12.2 ერთი საერთო და ერთი სარეზერვო მართვის დიაგრამა
12.3 ერთი საერთო და ერთი სარეზერვო მართვის დიაგრამა
ინსტრუქცია:
1. დიაგრამაზე, გარე ტერმინალი იყენებს ორხაზიან ტიპს
(როდესაც 1KA1 ან 2KA1 დახურულია, ის ირთვება. როდესაც ისინი ფუჭდება, ის ჩერდება.)
2. 75 კვტ-ზე მეტი სიმძლავრის რბილი სტარტერი საჭიროებს შემოვლითი კონტაქტორის კოჭის შუა რელეთი მართვას, რადგან რბილი სტარტერის შიდა შუა რელეს კონტაქტის გამტარუნარიანობა შეზღუდულია.